
Current Visitors:
J. Wang, N. Wu, X. Lu, X. Zhao, and K. Feng
IEEE Transactions on Knowledge and Data Engineering (TKDE), 2019
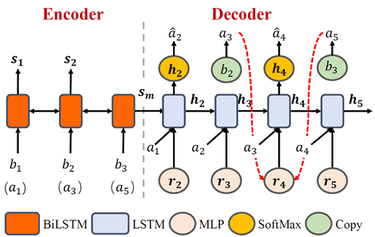
With the development of location-acquisition technologies, there are a huge number of mobile trajectories generated in a variety of domains. However, due to the constraints of device and environment, many trajectories are recorded at a low sampling rate, which increases the uncertainty between two consecutive sampled points in the trajectories. Our task is to recover a high-sampled trajectory based on the irregular low-sampled trajectory. There are two major problems with traditional solutions. First, many of these methods rely on heuristic search algorithms or simple probabilistic models, which cannot well capture complex sequential dependencies or global correlations. Second, most of the previous studies adopt a common preprocessing to map the trajectory into discrete units, which bring noises. To address the above difficulties, we propose a novel Deep Hybrid Trajectory Recovery model. Our model extends the classic sequence-to-sequence generation framework by implementing a subsequence-to-sequence recovery model tailored for the current task, named subseq2seq. In order to effectively capture spatiotemporal correlations, we adopt both spatial and temporal attentions for enhancing the model performance. Furthermore, we integrate the subseq2seq with a Kalman filter component to calibrate coarse-grained discrete units as fine-grained coordinates. Extensive results on real-world datasets have shown the superiority of the proposed model. Our contribution can be summarized as: 1. We propose a novel deep hybrid model by integrating subseq2seq with KF for trajectory recovery. To our knowledge, it is the first time that deep learning is integrated with KF for the studied task. By using a hybrid of neural networks and KF, our model is endowed with the benefits of both components, i.e., the capacities of modeling complex sequence data and reducing predictive noise. 2. l As one of our major technical component, we extend the classic seq2seq framework as the subseq2seq for solving the current task. The subseq2seq approach utilizes the elaborately designed spatiotemporal attention mechanisms, which enhances the capacity of modeling complex data correlations. 3. We construct the evaluation experiments using three real-world taxi trajectory datasets. Extensive results on the three datasets have shown the superiority of the proposed model in both effectiveness and interpretability.
@article{wang2019deep,
title={Deep Trajectory Recovery with Fine-Grained Calibration using Kalman Filter},
author={Wang, Jingyuan and Wu, Ning and Lu, Xinxi and Zhao, Xin and Feng, Kai},
journal={IEEE Transactions on Knowledge and Data Engineering},
year={2019},
publisher={IEEE}
}